
Authors:
(1) Hamed Alimohammadzadeh, University of Southern California, Los Angeles, USA;
(2) Rohit Bernard, University of Southern California, Los Angeles, USA;
(3) Yang Chen, University of Southern California, Los Angeles, USA;
(4) Trung Phan, University of Southern California, Los Angeles, USA;
(5) Prashant Singh, University of Southern California, Los Angeles, USA;
(6) Shuqin Zhu, University of Southern California, Los Angeles, USA;
(7) Heather Culbertson, University of Southern California, Los Angeles, USA;
(8) Shahram Ghandeharizadeh, University of Southern California, Los Angeles, USA.
Table of Links
Conclusions and Current Efforts, Acknowledgments, and References
6 CONCLUSIONS AND CURRENT EFFORTS
A DV is an essential tool to design and implement future multimedia applications using FLSs. We are currently designing and developing hardware and software in support of a DV’s kinesthetic haptic user interactions. This includes IRB-approved human subject studies towards the goal of using one or more FLSs to provide a high force for generating a stiff surface without losing stability or compromising user safety.
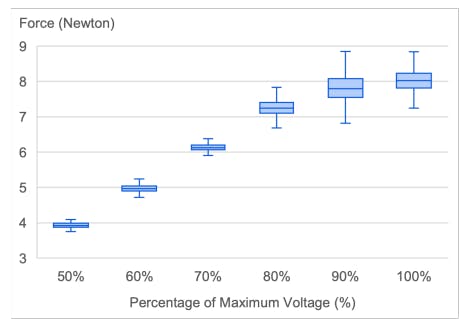
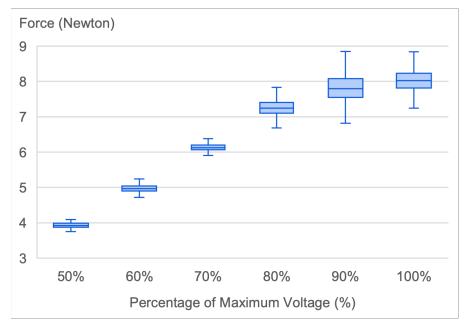
Our effort is a combination of empirical studies, physics inspired simulation and analytical models. We are designing large drones with different cage arrangements to conduct the human subject studies. This includes quantifying the force exerted by the drones, see Figure 8 and a video demonstration at https://youtu.be/ O7nFdFXhbwQ. Figure 9 shows the measured force in Newtons as a function of the maximum voltage of the motors. The resulting thrust of the motors is directly related to this voltage and creates the measured force. These measurements were made across 3000 samples during 3 seconds. The standard deviation is small[5], demonstrating the force exerted can be repeatedly controlled with a high accuracy. With our cage designs and a single motor, we observe minimal impact on the thrust and force generated by the motor with the presence of a cage.
Focusing on small drones, in addition to the discussions of Section 3, we are investigating the feasibility of multiple miniature sized FLSs coming in contact with a user at high speeds. To evaluate the stability of FLSs in such formations, we are conducting empirical studies that fly a swarm of (Crazyflies) drones in a close circular formation. This formation may be horizontal, vertical, or slanted at 45 degrees. Videos available at https://youtu.be/oT5RR8RPl0I, https:// youtu.be/TQM4hMBwLHM, and https://youtu.be/NNlWn9VW894 respectively.
We will use the results from both the large and small drones to model how the measured forces change with different sized drones, propeller sizes, and motor characteristics. Moreover, we are developing a class of PID controllers that allow a drone to follow a pre-defined path and render a pre-specified force output. These use a Vicon localization system with centimeter-level accuracy.
We interface a Raspberry Pi 4 as the CPU of Figure 4 with the drone’s FC to control its attitude and exerted force. We are implementing a decentralized localization technique, collision avoidance, and FLS failure handling techniques in software. Each is a finite state machine with an event-driven framework to implement its functionality. This framework represents an FLS as an abstract machine that can be in exactly one of a finite number of states at a given time. An event handler processes a queue of events that transitions the state of this abstract machine. It processes events sequentially and atomically, preventing undesirable race conditions caused by inter-leaved execution of events.
Using the Python programming language, we have implemented a scalable emulator with processes. Each process represents an FLS, communicates using UDP[6], and implements the aforementioned state machines with an event queue and event handlers. At the time of this writing, we have an implementation of a decentralized localization technique, a centralized and decentralized FLS group formation technique, and a centralized (APF [38, 68]) and a decentralized collision avoidance techniques. While the centralized algorithms are intended for use by the DV Hub, the decentralized algorithms are to be deployed on the FLSs. The emulator scales both vertically with many (400) cores and horizontally with multiple servers.
7 ACKNOWLEDGMENTS
This research was supported in part by the NSF grant IIS-2232382.
REFERENCES
[1] Muhammad Abdullah, Minji Kim, Waseem Hassan, Yoshihiro Kuroda, and Seokhee Jeon. 2018. HapticDrone: An Encountered-type Kinesthetic Haptic Interface with Controllable Force Feedback: Example of Stiffness and Weight Rendering. In Proc. IEEE Haptics Symposium. IEEE, 334–339.
[2] Michael C. Achtelik, Jan Stumpf, Daniel Gurdan, and Klaus-Michael Doth. 2011. Design of a Flexible High Performance Quadcopter Platform Breaking the MAV Endurance Record with Laser Power Beaming. In 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. 5166–5172. https://doi.org/10.1109/ IROS.2011.6094731
[3] Hamed Alimohammadzadeh, Daryon Mehraban, and Shahram Ghandeharizadeh. 2023. Modeling Illumination Data with Flying Light Specks. In ACM Multimedia Systems (Vancouver, Canada) (MMSys ’23). Association for Computing Machinery, New York, NY, USA, 363–368. https://doi.org/10.1145/3587819.3592544
[4] Iuliu-Cezar Ardelean, Dima Usov, Antonio Filippone, Ben Parslew, and Peter Hollingsworth. 2023. Unmanned Wingless Rotorcraft Scaling. Journal of Aircraft (2023), 1–11. https://doi.org/10.2514/1.C037299 arXiv:https://doi.org/10.2514/1.C037299
[5] Senthil Hariharan Arul and D. Manocha. 2020. DCAD: Decentralized Collision Avoidance With Dynamics Constraints for Agile Quadrotor Swarms. IEEE Robotics and Automation Letters 5 (2020), 1191–1198. https://doi.org/10.1109/LRA. 2020.2967281
[6] Federico Augugliaro, Angela Schoellig, and Raffaello D’Andrea. 2012. Generation of Collision-Free Trajectories for a Quadrocopter Fleet: A Sequential Convex Programming Approach. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE/RSJ International Conference on Intelligent Robots and Systems. 1917–1922. https://doi.org/10.1109/IROS.2012.6385823
[7] Daman Bareiss and Joran van den Berg. 2013. Reciprocal Collision Avoidance for Robots with Linear Dynamics using LQR-Obstacles. In Proceedings - IEEE International Conference on Robotics and Automation. 3847–3853. https://doi.org/ 10.1109/ICRA.2013.6631118
[8] Patric Beinschob, Mark Meyer, Christoph Reinke, Valerio Digani, Cristian Secchi, and Lorenzo Sabattini. 2017. Semi-automated Map Creation for Fast Deployment of AGV Fleets in Modern Logistics. Robotics and Autonomous Systems 87 (2017), 281–295. https://doi.org/10.1016/j.robot.2016.10.018
[9] Fabio Bernardini, Alice Buffi, Daniele Fontanelli, David Macii, Valerio Magnago, Mirko Marracci, Andrea Motroni, Paolo Nepa, and Bernardo Tellini. 2021. RobotBased Indoor Positioning of UHF-RFID Tags: The SAR Method With Multiple Trajectories. IEEE Transactions on Instrumentation and Measurement 70 (2021), 1–15. https://doi.org/10.1109/TIM.2020.3033728
[10] Massimiliano Bertoni, Stefano Michieletto, Roberto Oboe, and Giulia Michieletto. 2022. Indoor Visual-Based Localization System for Multi-Rotor UAVs. Sensors 22, 15 (2022). https://doi.org/10.3390/s22155798
[11] Sean Braley, Calvin Rubens, Timothy Merritt, and Roel Vertegaal. 2018. GridDrones: A Self-Levitating Physical Voxel Lattice for Interactive 3D Surface Deformations. In Proceedings of the 31st Annual ACM Symposium on User Interface Software and Technology (Berlin, Germany) (UIST ’18). Association for Computing Machinery, New York, NY, USA, 87–98. https://doi.org/10.1145/3242587.3242658
[12] Tomáš Báča, Daniel Hert, Giuseppe Loianno, Martin Saska, and Vijay Kumar. 2018. Model Predictive Trajectory Tracking and Collision Avoidance for Reliable Outdoor Deployment of Unmanned Aerial Vehicles. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 6753–6760. https://doi.org/ 10.1109/IROS.2018.8594266
[13] D. Cappello, S. Garcin, Z. Mao, M. Sassano, A. Paranjape, and T. Mylvaganam. 2020. A Hybrid Controller for Multi-Agent Collision Avoidance via a Differential Game Formulation. IEEE Transactions on Control Systems Technology PP (07 2020), 1–8. https://doi.org/10.1109/TCST.2020.3005602
[14] Haige Chen and Ashutosh Dhekne. 2022. A Metric for Quantifying UWB Ranging Error Due to Clock Drifts. In 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN). 1–8. https://doi.org/10.1109/IPIN54987. 2022.9918104
[15] Siyuan Chen, Dong Yin, and Yifeng Niu. 2022. A Survey of Robot Swarms and Relative Localization Method. Sensors 22, 12 (2022). https://doi.org/10.3390/ s22124424
[16] Yu Fan Chen, Mark Cutler, and Jonathan How. 2015. Decoupled Multiagent Path Planning via Incremental Sequential Convex Programming. Proceedings - IEEE International Conference on Robotics and Automation 2015 (06 2015), 5954–5961. https://doi.org/10.1109/ICRA.2015.7140034
[17] Hui Cheng, Q. Zhu, Z. Liu, Tianye Xu, and Liang Lin. 2017. Decentralized Navigation of Multiple Agents Based on ORCA and Model Predictive Control. In 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 3446–3451. https://doi.org/10.1109/IROS.2017.8206184
[18] Younghun Cho, Giseop Kim, Sangmin Lee, and Jee-Hwan Ryu. 2022. OpenStreetMap-Based LiDAR Global Localization in Urban Environment Without a Prior LiDAR Map. IEEE Robotics and Automation Letters 7, 2 (2022), 4999–5006. https://doi.org/10.1109/LRA.2022.3152476
[19] Heather Culbertson and Katherine J Kuchenbecker. 2016. Importance of Matching Physical Friction, Hardness, and Texture in Creating Realistic Haptic Virtual Surfaces. IEEE Transactions on Haptics 10, 1 (2016), 63–74.
[20] Decawave. 2017. DW1000 User Manual: How to Use, Configure, and Program the DW1000 UWB Transceiver. See https://www.qorvo.com/products/d/da007967.
[21] Joseph DeSimone. Onstage at TED2015. See https://www.ted.com/ talks/joseph_desimone_what_3d_printing_was_100x_faster?language=en#t20146. What if 3D Printing was 100x Faster?
[22] Robert W. Deters, Or D. Dantsker, Stefan Kleinke, Narcrisha Norman, and Michael Selig. 2018. Static Performance Results of Propellers Used on Nano, Micro, and Mini Quadrotors. https://doi.org/10.2514/6.2018-4122 arXiv:https://arc.aiaa.org/doi/pdf/10.2514/6.2018-4122
[23] T. Engelhardt, T. Konrad, Bjorn E. Schafer, and D. Abel. 2016. Flatness-Based Control for a Quadrotor Camera Helicopter using Model Predictive Control Trajectory Generation. In 24th Mediterranean Conference on Control and Automation (MED). 852–859.
[24] Eduardo Ferrera, Alfonso Alcántara, J. Capitán, Á. R. Castaño, P. Marrón, and A. Ollero. 2018. Decentralized 3D Collision Avoidance for Multiple UAVs in Outdoor Environments. Sensors (Basel, Switzerland) 18 (2018).
[25] Shahram Ghandeharizadeh. 2021. Holodeck: Immersive 3D Displays Using Swarms of Flying Light Specks. In ACM Multimedia Asia (Gold Coast, Australia). https://doi.org/10.1145/3469877.3493698
[26] Shahram Ghandeharizadeh. 2022. Display of 3D Illuminations using Flying Light Specks. In ACM Multimedia (Lisboa, Portugal) (MM ’22). Association for Computing Machinery, New York, NY, USA. https://doi.org/10.1145/3503161. 3548250
[27] Shahram Ghandeharizadeh and Luis Garcia. 2022. Safety in the Emerging Holodeck Applications. In CHI 2022 Workshop on Novel Challenges of Safety, Security and Privacy in Extended Reality.
[28] S.C. Goldstein, J.D. Campbell, and T.C. Mowry. 2005. Programmable Matter. Computer 38, 6 (2005), 99–101. https://doi.org/10.1109/MC.2005.198
[29] Antonio Gomes, Calvin Rubens, Sean Braley, and Roel Vertegaal. 2016. Bitdrones: Towards using 3d nanocopter displays as interactive self-levitating programmable matter. In Proc. ACM CHI Conference on Human Factors in Computing Systems. 770–780.
[30] Yanying Gu, Anthony C. C. Lo, and Ignas G. Niemegeers. 2009. A Survey of Indoor Positioning Systems for Wireless Personal Networks. IEEE Commun. Surv. Tutorials 11, 1 (2009), 13–32. https://doi.org/10.1109/SURV.2009.090103
[31] Stephen. J. Guy, Jatin Chhugani, Changkyu Kim, Nadathur Satish, Ming Lin, Dinesh Manocha, and Pradeep Dubey. 2009. ClearPath: Highly Parallel Collision Avoidance for Multi-Agent Simulation. In Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (New Orleans, Louisiana) (SCA ’09). Association for Computing Machinery, New York, NY, USA, 177–187. https://doi.org/10.1145/1599470.1599494
[32] Michael Hamer, Lino Widmer, and Raffaello Drandrea. 2018. Fast Generation of Collision-Free Trajectories for Robot Swarms Using GPU Acceleration. IEEE Access PP (12 2018), 1–1. https://doi.org/10.1109/ACCESS.2018.2889533
[33] Hao Jiang, Tianlu Mao, Shuangyuan Wu, Mingliang Xu, and Zhaoqi Wang. 2014. A Local Evaluation Approach for Multi-Agent Navigation in Dynamic Scenarios. In Proceedings of the 13th ACM SIGGRAPH International Conference on VirtualReality Continuum and Its Applications in Industry (Shenzhen, China) (VRCAI ’14). Association for Computing Machinery, New York, NY, USA, 89–93. https: //doi.org/10.1145/2670473.2670493
[34] Lynette A Jones and Susan J Lederman. 2006. Human Hand Function. Oxford University Press.
[35] Alex Kushleyev, Daniel Mellinger, Caitlin Powers, and Vijay Kumar. 2013. Towards a Swarm of Agile Micro Quadrotors. Autonomous Robots 35 (11 2013), 573–7527. https://doi.org/10.1007/s10514-013-9349-9
[36] Fabrizio Lazzari, Alice Buffi, Paolo Nepa, and Sandro Lazzari. 2017. Numerical Investigation of an UWB Localization Technique for Unmanned Aerial Vehicles in Outdoor Scenarios. IEEE Sensors Journal 17, 9 (2017), 2896–2903. https: //doi.org/10.1109/JSEN.2017.2684817
[37] Anton Ledergerber, Michael Hamer, and Raffaello D’Andrea. 2015. A Robot Self-Localization System using One-Way Ultra-Wideband Communication. In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 3131–3137. https://doi.org/10.1109/IROS.2015.7353810
[38] Yansheng Liu, Juntong Qi, Mingming Wang, Chong Wu, and Hang Sun. 2022. Path Planning for Large-scale UAV Formation Based on Improved SA-APF Algorithm. In 2022 41st Chinese Control Conference (CCC). 4472–4478. https://doi.org/10. 23919/CCC55666.2022.9901852
[39] Nicola Macoir, Jan Bauwens, Bart Jooris, Ben Van Herbruggen, Jen Rossey, Jeroen Hoebeke, and Eli De Poorter. 2019. UWB Localization with Battery-Powered Wireless Backbone for Drone-Based Inventory Management. Sensors 19, 3 (2019), 467. https://doi.org/10.3390/s19030467
[40] Luca Mainetti, Luigi Patrono, and Ilaria Sergi. 2014. A Survey on Indoor Positioning Systems. In 22nd International Conference on Software, Telecommunications and Computer Networks (SoftCOM). IEEE, 111–120. https://doi.org/10.1109/ SOFTCOM.2014.7039067
[41] Thomas H Massie and J Kenneth Salisbury. 1994. The Phantom Haptic Interface: A Device for Probing Virtual Objects. In Proc. ASME Winter Annual Meeting, Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, Vol. 55. ASME, 295–300.
[42] William A. McNeely. 1993. Robotic Graphics: A New Approach to Force Feedback for Virtual Reality. In Proceedings of IEEE Virtual Reality Annual International Symposium. 336–341. https://doi.org/10.1109/VRAIS.1993.380761
[43] Dubravko Miljković. 2018. Methods for Attenuation of Unmanned Aerial Vehicle Noise. In 2018 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO). 0914–0919. https://doi.org/ 10.23919/MIPRO.2018.8400169
[44] Daniel Morgan, Soon-Jo Chung, and Fred Hadaegh. 2013. Decentralized Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming. In Advances in the Astronautical Sciences.
[45] Daniel Morgan, Soon-Jo Chung, and Fred Y. Hadaegh. 2014. Model Predictive Control of Swarms of Spacecraft Using Sequential Convex Programming. Journal of Guidance, Control, and Dynamics 37, 6 (2014), 1725–1740. https://doi.org/10. 2514/1.G000218
[46] Frédéric Muttin. 2011. Umbilical deployment modeling for tethered UAV detecting oil pollution from ship. Applied Ocean Research 33, 4 (2011), 332–343. https: //doi.org/10.1016/j.apor.2011.06.004
[47] Thulasi Mylvaganam, Mario Sassano, and Alessandro Astolfi. 2017. A Differential Game Approach to Multi-Agent Collision Avoidance. IEEE Trans. Automat. Control PP (04 2017), 4229–4235. https://doi.org/10.1109/TAC.2017.2680602
[48] Serban Georgica Obreja and Alexandru Vulpe. 2020. Evaluation of an Indoor Localization Solution Based on Bluetooth Low Energy Beacons. In 2020 13th International Conference on Communications (COMM). 227–231. https://doi.org/ 10.1109/COMM48946.2020.9141987
[49] Jie Ouyang, Yueling Che, Jie Xu, and Kaishun Wu. 2018. Throughput Maximization for Laser-Powered UAV Wireless Communication Systems. In 2018 IEEE International Conference on Communications Workshops (ICC Workshops). 1–6. https://doi.org/10.1109/ICCW.2018.8403572
[50] Sohel J. Patel and Maciej J. Zawodniok. 2022. 3D Localization of RFID Antenna Tags Using Convolutional Neural Networks. IEEE Transactions on Instrumentation and Measurement 71 (2022), 1–11. https://doi.org/10.1109/TIM.2022.3146604
[51] Maxim Pavliv, Fabrizio Schiano, Christopher Reardon, Dario Floreano, and Giuseppe Loianno. 2021. Tracking and Relative Localization of Drone Swarms With a Vision-Based Headset. IEEE Robotics and Automation Letters 6, 2 (2021), 1455–1462. https://doi.org/10.1109/LRA.2021.3051565
[52] Trung Phan, Hamed Alimohammadzadeh, Heather Culbertson, and Shahram Ghandeharizadeh. 2023. An Evaluation of Three Distance Measurement Sensors for Flying Light Specks. In International Conference on Intelligent Metaverse Technologies and Applications (iMETA).
[53] James Preiss, Wolfgang Hoenig, Nora Ayanian, and Gaurav Sukhatme. 2017. Downwash-Aware Trajectory Planning for Large Quadcopter Teams. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (04 2017), 8.
[54] James Preiss, Wolfgang Honig, Gaurav Sukhatme, and Nora Ayanian. 2017. Crazyswarm: A Large Nano-Quadcopter Swarm. In International Conference on Robotics and Automation (ICRA). IEEE, 3299–3304. https://doi.org/10.1109/ ICRA.2017.7989376
[55] Guenther Retscher. 2020. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors 20, 18 (2020), 5121. https://doi.org/10.3390/s20185121
[56] Craig W. Reynolds. 1987. Flocks, Herds and Schools: A Distributed Behavioral Model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques (SIGGRAPH ’87). Association for Computing Machinery, New York, NY, USA, 25–34. https://doi.org/10.1145/37401.37406
[57] Robin Ritz, Mark W. Müller, Markus Hehn, and Raffaello D’Andrea. 2012. Cooperative Quadrocopter Ball Throwing and Catching. In 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. 4972–4978. https: //doi.org/10.1109/IROS.2012.6385963
[58] Benjamin Riviere, Wolfgang Honig, Yisong Yue, and Soon-Jo Chung. 2020. GLAS: Global-to-Local Safe Autonomy Synthesis for Multi-Robot Motion Planning With End-to-End Learning. IEEE Robotics and Automation Letters 5, 3 (jul 2020), 4249–4256. https://doi.org/10.1109/lra.2020.2994035
[59] Alina Rubina, Oleksandr Artemenko, Oleksandr Andryeyev, and Andreas Mitschele-Thiel. 2017. A Novel Hybrid Path Planning Algorithm for Localization in Wireless Networks. In Proceedings of the 3rd Workshop on Micro Aerial Vehicle Networks, Systems, and Applications (Niagara Falls, New York, USA) (DroNet ’17). Association for Computing Machinery, New York, NY, USA, 13–16. https://doi.org/10.1145/3086439.3086441
[60] Shigeru Saito, Atsushi Hiyama, Tomohiro Tanikawa, and Michitaka Hirose. 2007. Indoor Marker-based Localization Using Coded Seamless Pattern for Interior Decoration. In 2007 IEEE Virtual Reality Conference. 67–74. https://doi.org/10. 1109/VR.2007.352465
[61] Beat Schäffer, Reto Pieren, Kurt Heutschi, Jean Marc Wunderli, and Stefan Becker. 2021. Drone Noise Emission Characteristics and Noise Effects on Humans—A Systematic Review. International Journal of Environmental Research and Public Health 18, 11 (jun 2021), 5940. https://doi.org/10.3390/ijerph18115940
[62] Guanya Shi, Wolfgang Hönig, Xichen Shi, Yisong Yue, and Soon-Jo Chung. 2022. Neural-Swarm2: Planning and Control of Heterogeneous Multirotor Swarms Using Learned Interactions. IEEE Transactions on Robotics 38, 2 (2022), 1063–1079. https://doi.org/10.1109/TRO.2021.3098436
[63] Bruno Silva, Zhibo Pang, Johan Åkerberg, Jonas Neander, and Gerhard Hancke. 2014. Experimental study of UWB-based high precision localization for industrial applications. In 2014 IEEE International Conference on Ultra-WideBand (ICUWB). 280–285. https://doi.org/10.1109/ICUWB.2014.6958993
[64] Giorgia Sinibaldi and L. Marino. 2013. Experimental Analysis on the Noise of Propellers for Small UAV. Applied Acoustics 74 (01 2013). https://doi.org/10.1016/ j.apacoust.2012.06.011
[65] Haryong Song, Wonsub Choi, and Haedong Kim. 2016. Robust Vision-Based Relative-Localization Approach Using an RGB-Depth Camera and LiDAR Sensor Fusion. IEEE Transactions on Industrial Electronics 63, 6 (2016), 3725–3736. https: //doi.org/10.1109/TIE.2016.2521346
[66] SpeedyBee. 2023. SpeedyBee F7 V3 BL32 50A 30x30 Stack. See https://www. speedybee.com/speedybee-f7-v3-bl32-50a-30x30-stack/.
[67] Martin Stephan, Javier Alonso-Mora, and Roland Siegwart. 2013. Reciprocal Collision Avoidance With Motion Continuity Constraints. IEEE Transactions on Robotics 29 (08 2013), 899–912. https://doi.org/10.1109/TRO.2013.2258733
[68] Hang Sun, Juntong Qi, Chong Wu, and Mingming Wang. 2020. Path Planning for Dense Drone Formation Based on Modified Artificial Potential Fields. 39th Chinese Control Conference (CCC) (2020), 4658–4664.
[69] Kurt A. Swieringa, Clarence B. Hanson, Johnhenri R. Richardson, Jonathan D. White, Zahid Hasan, Elizabeth Qian, and Anouck Girard. 2010. Autonomous Battery Swapping System for Small-Scale Helicopters. In 2010 IEEE International Conference on Robotics and Automation. 3335–3340. https://doi.org/10.1109/ ROBOT.2010.5509165
[70] Camilla Tabasso, Venanzio Cichella, Syed Mehdi, Thiago Marinho, and Naira Hovakimyan. 2021. Time Coordination and Collision Avoidance Using LeaderFollower Strategies in Multi-Vehicle Missions. Robotics 10 (02 2021), 34. https: //doi.org/10.3390/robotics10010034
[71] Jur van den Berg, Stephen Guy, Ming Lin, and Dinesh Manocha. 2011. Reciprocal n-Body Collision Avoidance. Vol. 70. 3–19. https://doi.org/10.1007/978-3-642- 19457-3_1
[72] Jur van den Berg, Ming Lin, and Dinesh Manocha. 2008. Reciprocal Velocity Obstacles for Real-Time Multi-agent Navigation. In IEEE International Conference on Robotics and Automation. IEEE, 1928–1935. https://doi.org/10.1109/ROBOT. 2008.4543489
[73] Jur van den Berg, Jamie Snape, Stephen Guy, and Dinesh Manocha. 2011. Reciprocal Collision Avoidance with Acceleration-Velocity Obstacles. In 2011 IEEE International Conference on Robotics and Automation. 3475–3482. https: //doi.org/10.1109/ICRA.2011.5980408
[74] Jur van den Berg, David Wilkie, Stephen Guy, Marc Niethammer, and Dinesh Manocha. 2012. LQG-obstacles: Feedback Control with Collision Avoidance for Mobile Robots with Motion and Sensing Uncertainty. In Proceedings - IEEE International Conference on Robotics and Automation. IEEE, 346–353. https: //doi.org/10.1109/ICRA.2012.6224648
[75] Yixin Wang, Qiang Ye, Jie Cheng, and Lei Wang. 2015. RSSI-Based Bluetooth Indoor Localization. In 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN). 165–171. https://doi.org/10.1109/MSN.2015.14
[76] Jinhui Wu, Dequan Zhang, Jie Liu, and Xu Han. 2020. A Moment Approach to Positioning Accuracy Reliability Analysis for Industrial Robots. IEEE Transactions on Reliability 69, 2 (2020), 699–714. https://doi.org/10.1109/TR.2019.2919540
[77] Yang Xu, Shupeng Lai, Jiaxin Li, Delin Luo, and Yancheng You. 2019. Concurrent Optimal Trajectory Planning for Indoor Quadrotor Formation Switching. Journal of Intelligent & Robotic Systems 94 (05 2019). https://doi.org/10.1007/s10846-018- 0813-9
[78] Yingxiao Xu, Long Pan, Chun Du, Jun Li, Ning Jing, and Jiangjiang Wu. 2018. Vision-Based UAVs Aerial Image Localization: A Survey. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on AI for Geographic Knowledge Discovery (Seattle, WA, USA) (GeoAI’18). Association for Computing Machinery, New York, NY, USA, 9–18. https://doi.org/10.1145/3281548.3281556
[79] Faheem Zafari, Athanasios Gkelias, and Kin K. Leung. 2019. A Survey of Indoor Localization Systems and Technologies. IEEE Communications Surveys and Tutorials 21, 3 (2019), 2568–2599. https://doi.org/10.1109/COMST.2019.2911558
[80] Jitong Zhang, Mingrong Ren, Pu Wang, Juan Meng, and Yuman Mu. 2020. Indoor Localization Based on VIO System and Three-Dimensional Map Matching. Sensors 20, 10 (2020), 2790. https://doi.org/10.3390/s20102790
[81] Jian Zhang, Xiangyu Wang, Zhitao Yu, Yibo Lyu, Shiwen Mao, Senthilkumar CG Periaswamy, Justin Patton, and Xuyu Wang. 2019. Robust RFID Based 6-DoF Localization for Unmanned Aerial Vehicles. IEEE Access 7 (2019), 77348–77361. https://doi.org/10.1109/ACCESS.2019.2922211
This paper is available on arxiv under CC 4.0 license.
[5] The highest standard deviation is 0.43 and observed with 90% thrust.
[6] We support both packet loss and out of order packet delivery.